휴머노이드 이야기를 하면 대부분 “더 똑똑한 모델"부터 떠올린다. 파운데이션 모델을 얹고, 멀티모달을 붙이고, 추론을 길게 돌리면 금방 사람처럼 일할 것 같다고 말한다. 그런데 공장 바닥이나 물류 현장처럼 물리 세계가 지배하는 장소로 가면, 병목은 생각보다 단순한 곳에서 드러난다. 손끝과 팔, 몸통이 세계를 어떻게 느끼는가, 즉 피부 문제다.
최근 실제 현장 소식도 이 지점을 확인시켜 준다. 2026년 2월 보도에 따르면 Toyota의 캐나다 생산법인이 Agility의 휴머노이드 7대를 계약해 부품 운반 같은 반복 작업에 투입한다. 상징적인 건 “휴머노이드 도입” 자체가 아니라, 여전히 배치와 운영 조건을 매우 보수적으로 설계한다는 점이다. 강한 힘을 내는 로봇은 사람 근처에서 자율로 안전하게 일하기엔 아직 신뢰성이 충분치 않다는 문장이 기사에 그대로 나온다. 이 문장은 결국 같은 질문으로 귀결된다. 로봇이 사람처럼 가까운 거리에서 부딪히지 않고, 닿았을 때도 안전하게 반응하며, 미끄러짐·압력·열·손상 신호를 즉시 구분할 수 있는가.
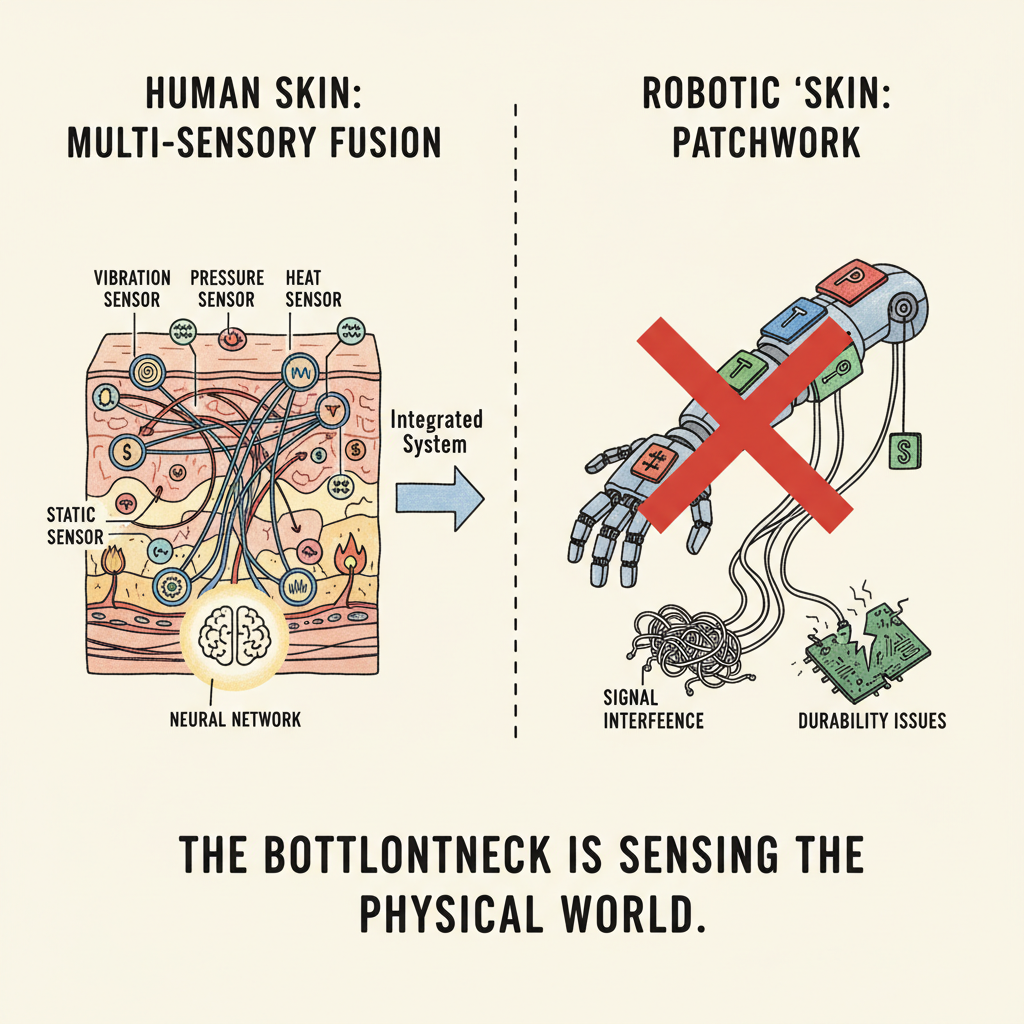
왜 “피부"가 병목이 되는가
사람 피부는 단일 센서가 아니다. 서로 다른 역할을 가진 여러 기계수용기가 층과 위치를 달리해 촘촘히 배치된 분산 시스템이다. 어떤 수용기는 진동 변화에 빠르게 반응하고, 어떤 수용기는 정적 압력과 변형을 오래 추적한다. 즉, 사람의 촉각은 처음부터 “멀티센서 융합” 구조다.
반대로 많은 로봇 촉각은 오랫동안 “센서 부품의 패치워크"에 가까웠다. 압력은 A센서, 온도는 B센서, 미끄러짐은 C센서를 따로 붙이다 보니 제작 복잡도와 신호 간섭, 내구성 이슈가 동시에 커진다. 실제로 2025년 UCL·케임브리지 연구팀은 이 한계를 정면으로 건드렸다. 이들은 단일 재료 기반 전자피부를 제시했고, 한 장의 피부 전체를 감지 영역으로 쓰면서도 다양한 접촉 유형을 구분하는 접근을 보여줬다. 공개된 실험 설명에서 핵심 숫자는 두 가지다. 재료 내부의 매우 촘촘한 경로를 통해 86만 개 이상 수준의 신호 경로를 활용했고, 손목부 32개 전극 구성만으로도 대면적 손 모양 스킨에서 대량의 측정 정보를 뽑아냈다. 요약하면, “센서를 더 붙이는 방식"이 아니라 “재료 자체를 센서화"하는 방향 전환이다.
여기에 한 단계 더 나아간 흐름이 2025년 JAIST의 ProTac 계열이다. 이 접근은 투명/불투명 전환이 가능한 소프트 스킨과 내부 카메라를 결합해, 가까이 다가오는 물체 감지(근접)와 접촉 후 변형 인식(촉각)을 하나의 구조에서 번갈아 수행한다. 말하자면 피부가 단순히 닿은 뒤 반응하는 장치가 아니라, 닿기 전 예고 신호까지 읽는 능동 안전층으로 변한다. 휴머노이드가 사람 주변에서 자연스럽게 움직이려면 이 “사전 감지 + 접촉 해석” 결합이 사실상 필수다.
뇌 성능 경쟁보다 먼저 풀어야 할 실전 과제
업계는 보통 소프트웨어 스택의 진화를 더 크게 말한다. 하지만 현장 운영자는 다른 질문부터 한다. 밤샘 교대에서도 센서 편차가 버티는가, 보호 커버가 찢어진 뒤에도 보정 가능한가, 물류 박스 표면이 매일 달라져도 미끄러짐 추정이 무너지지 않는가, 고장 난 모듈 교체 시간이 라인 정지를 감당할 만큼 짧은가. 이 질문들에 답하지 못하면, 모델이 아무리 똑똑해도 배치 밀도는 올라가지 않는다.
그래서 앞으로의 승부는 “더 큰 뇌” 단독 경쟁이 아니라 “촉각 인프라 + 제어 + 운영"의 패키지 경쟁이 된다. 첫째, 촉각 스킨은 전신으로 확장될수록 데이터량이 폭증하므로 센서 설계와 로컬 전처리 아키텍처가 함께 가야 한다. 둘째, 촉각은 비전 대체재가 아니라 비전의 실패 구간을 메우는 보험이므로 멀티모달 제어 규칙이 현장 시나리오 기준으로 재작성돼야 한다. 셋째, 도입기업 입장에서 진짜 비용은 로봇 본체가 아니라 통합·유지보수·안전 검증 프로세스이기 때문에, 촉각 시스템은 성능만이 아니라 운용 단순성까지 증명해야 한다.
결론은 명확하다. 휴머노이드의 결정적 한계가 “뇌"가 아니냐는 질문은 절반만 맞다. 추론 능력은 분명 중요하다. 그러나 사람과 같은 공간에서 신뢰를 얻는 속도를 결정하는 건, 생각보다 훨씬 물리적인 층, 즉 피부다. 더 똑똑한 로봇보다 먼저 필요한 것은, 더 잘 느끼는 로봇이다.
Reference list
- TechCrunch (2026-02-19), Toyota contracts seven Agility humanoid robots for Canadian factory: https://techcrunch.com/2026/02/19/toyota-hires-seven-agility-humanoid-robots-for-canadian-factory/
- JAIST/TechXplore (2025-08-22), ProTac vision-based proximity+tactile sensing summary: https://techxplore.com/news/2025-08-soft-skin-sharp-robotic-danger.html
- IEEE Transactions on Robotics (DOI): https://doi.org/10.1109/TRO.2025.3593087
- UCL News (2025-06), Improved electronic skin gives robots the human touch: https://www.ucl.ac.uk/news/2025/jun/improved-electronic-skin-gives-robots-human-touch
- University of Cambridge Engineering News, Single-material electronic skin gives robots human touch: https://www.eng.cam.ac.uk/news/single-material-electronic-skin-gives-robots-human-touch
- Science Robotics (DOI, UCL/Cambridge paper): https://doi.org/10.1126/scirobotics.adq2303
- NCBI StatPearls, Physiology, Mechanoreceptors: https://www.ncbi.nlm.nih.gov/books/NBK541068/
- arXiv (2025), Tactile Robotics: An Outlook: https://arxiv.org/html/2508.11261v1